Matthias Hirschmanner
Matthias Hirschmanner
Home
Publications
Contact
Light
Dark
Automatic
1
Prototype of a Care Documentation Support System Using Audio Recordings of Care Actions and Large Language Models
Care documentation is an essential but time-consuming part of nursing practices. We present a first prototype to support care workers …
Matthias Hirschmanner
,
Reinhard Grabler
,
Helena Anna Frijns
,
Evelyn Mayer-Haas
,
Markus Vincze
PDF
Cite
Co-design of Robotic Technology with Care Home Residents and Care Workers
This paper reports on a co-design workshop series with residents and care workers in care homes, in which they ideate robotic …
Helena Anna Frijns
,
Ralf Vetter
,
Matthias Hirschmanner
,
Reinhard Grabler
,
Laura Vogel
,
Sabine Theresia Koeszegi
Cite
Investigating Transparency Methods in a Robot Word-Learning System and Their Effects on Human Teaching Behaviors
Robots need to understand words for references in social spaces (e.g., objects, locations, actions). Grounded language learning systems …
Matthias Hirschmanner
,
Stephanie Gross
,
Setareh Zafari
,
Brigitte Krenn
,
Friedrich Neubarth
,
Markus Vincze
PDF
Cite
Teleoperation System for Teaching Dexterous Manipulation
Dexterous robotic hands are necessary for many tasks requiring the capability of in-hand object manipulation or tool use. Teleoperation …
Stefan Zahlner
,
Matthias Hirschmanner
,
Timothy Patten
,
Markus Vincze
PDF
Cite
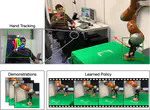
Learning Manipulation Tasks from Vision-based Teleoperation
Learning from demonstration is an approach to directly teach robots new tasks without explicit programming. Prior methods typically …
Matthias Hirschmanner
,
Ali Jamadi
,
Bernhard Neuberger
,
Timothy Patten
,
Markus Vincze
PDF
Cite
Virtual Reality Teleoperation of a Humanoid Robot Using Markerless Human Upper Body Pose Imitation
Teleoperation of robots with traditional input devices (joysticks, keyboard, etc.) is often difficult and cumbersome especially for …
Matthias Hirschmanner
,
Christiana Tsiourti
,
Tim Patten
,
Markus Vincze
PDF
Cite
Video
"You Are Doing so Great!" - The Effect of a Robot's Interaction Style on Self-Efficacy in HRI
The aim of this paper is to evaluate the effect of different interaction styles on self-efficacy in human-robot interaction (HRI), …
Setareh Zafari
,
Isabel Schwaninger
,
Matthias Hirschmanner
,
Christina Schmidbauer
,
Astrid Weiss
,
Sabine T. Koeszegi
PDF
Cite
Grounded Word Learning on a Pepper Robot
In this demonstration, we will showcase real-time grounded language learning on the humanoid robot Pepper. In particular, learn- ing …
Matthias Hirschmanner
,
Stephanie Gross
,
Brigitte Krenn
,
Friedrich Neubarth
,
Martin Trapp
,
Markus Vincze
PDF
Cite
Action Verb Corpus
The Action Verb Corpus comprises multimodal data of 12 humans conducting in total 390 simple actions (TAKE, PUT, and PUSH). Recorded …
Stephanie Gross
,
Matthias Hirschmanner
,
Brigitte Krenn
,
Friedrich Neubarth
,
Michael Zillich
PDF
Cite
Extension of the Action Verb Corpus for Supervised Learning
The Action Verb Corpus (AVC) is a multimodal dataset of simple actions for robot learning. The extension introduced here is especially …
Matthias Hirschmanner
,
Stephanie Gross
,
Brigitte Krenn
,
Friedrich Neubarth
,
Martin Trapp
,
Markus Vincze
PDF
Cite
»
Cite
×