Abstract
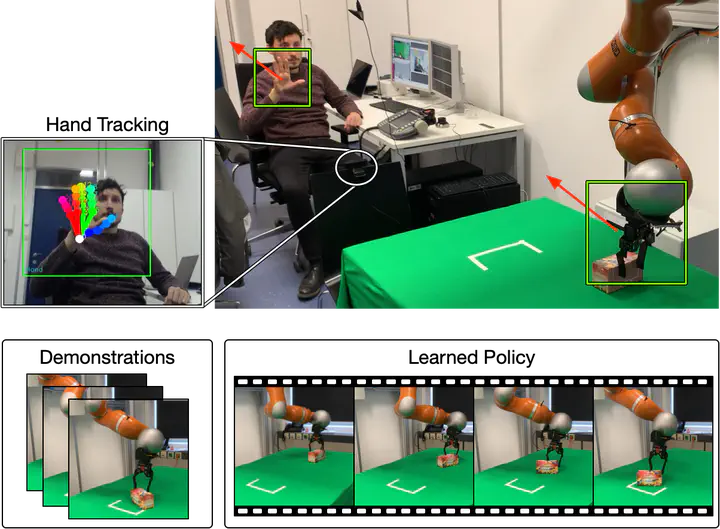
Learning from demonstration is an approach to directly teach robots new tasks without explicit programming. Prior methods typically collect demonstration data through kinesthetic teaching or teleoperation. This is challenging because the human must physically interact with the robot or use specialized hardware. This paper presents a teleoperation system based on tracking the human hand to alleviate the requirement of specific tools for robot control. The data recorded during the demonstration is used to train a deep imitation learning model that enables the robot to imitate the task. We conduct experiments with a KUKA LWR IV+ robotic arm for the task of pushing an object from a random start location to a goal location. Results show the successful completion of the task by the robot after only 100 collected demonstrations. In comparison to the baseline model, the introduction of regularization and data augmentation leads to a higher success rate.