Abstract
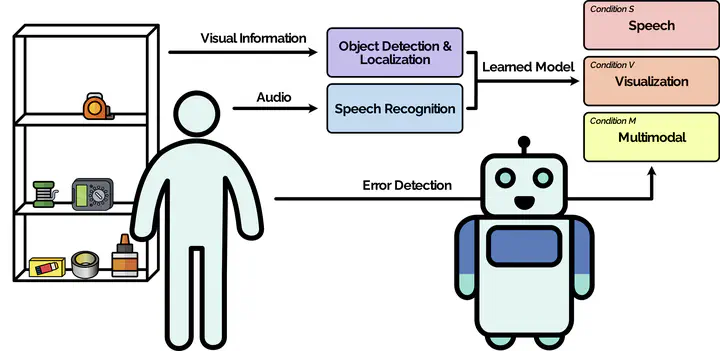
In human-robot collaboration, failures are bound to occur. A thorough understanding of potential errors is necessary so that robotic system designers can develop systems that remedy failure cases. In this work, we study failures that occur when participants interact with a working system and focus especially on errors in a robotic system’s knowledge base of which the system is not aware. A human interaction partner can be part of the error detection process if they are given insight into the robot’s knowledge and decision-making process. We investigate different communication modalities and the design of shared task representations in a joint human-robot object organization task. We conducted a user study (N = 31) in which the participants showed a Pepper robot how to organize objects, and the robot communicated the learned object configuration to the participants by means of speech, visualization, or a combination of speech and visualization. The multimodal, combined condition was preferred by 23 participants, followed by seven participants preferring the visualization. Based on the interviews, the errors that occurred, and the object configurations generated by the participants, we conclude that participants tend to test the system’s limitations by making the task more complex, which provokes errors. This trial-and-error behavior has a productive purpose and demonstrates that failures occur that arise from the combination of robot capabilities, the user’s understanding and actions, and interaction in the environment. Moreover, it demonstrates that failure can have a productive purpose in establishing better user mental models of the technology.