STAR: Shape-focused Texture Agnostic Representations for Improved Object Detection and 6D Pose Estimation
Abstract
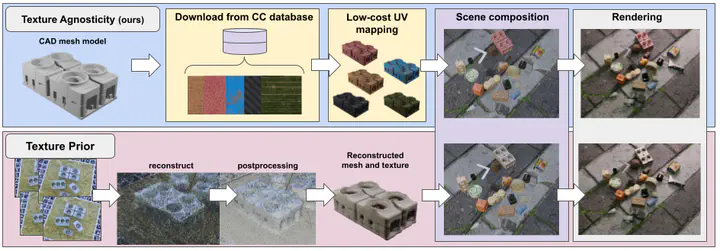
Recent advances in machine learning have greatly benefited object detection and 6D pose estimation for robotic grasping. However, textureless and metallic objects still pose a significant challenge due to fewer visual cues and the texture bias of CNNs. To address this issue, we propose a texture-agnostic approach that focuses on learning from CAD models and emphasizes object shape features. To achieve a focus on learning shape features, the textures are randomized during the rendering of the training data. By treating the texture as noise, the need for real-world object instances or their final appearance during training data generation is eliminated. The TLESS and ITODD datasets, specifically created for industrial settings in robotics and featuring textureless and metallic objects, were used for evaluation. Texture agnosticity also increases the robustness against image perturbations such as imaging noise, motion blur, and brightness changes, which are common in robotics applications.Code and datasets are publicly available at https://github.com/hoenigpeter/randomized_texturing.